


 1811245942
1811245942进行机器人虚拟样机的研究开发,将虚拟样机技术应用于机器人仿真研究领域。一方面拓展虚拟样机技术的研究与应用范围,同时在虚拟环境下对机器人产品的设计与分析也是今后数字化设计、制造的发展方向。机器人仿真研究中通过应用虚拟样机技术,可使设计人员从繁重的计算过程中解脱出来,将精力投人到虚拟样机系统的分析与优化过程,有效地进行系统评估,实际生产之前提供优化的设计产品。
该技术在计算机上通过CA D/CA M/CA E等技术将产品信息集成到计算机提供的可视化虚拟环境,虚拟样机(VimudPrototyp简称VP当前设计制造领域的一门新兴技术。实际产品制造之前实现产品的仿真、分析与优化过程。机器人仿真是机器人研究中的重要环节,可应用于机器人运动学、动力学分析,轨迹和路径规划,机器人与工作环境的相互作用,离线编程等方面。随着目前虚拟制造及数字化制造等先进制造技术的发展,机器人仿真也成为围绕产品生命周期的整个数字化设计、验证及制造环境的重要组成局部。研究与开发机器人虚拟样机系统,可以在虚拟环境中完成以上方面的研究工作,为机器人研究及先进制造技术的发展提供新的手段。
研究与开发工业机器人虚拟样机系统。首先说明虚拟样机技术并分析其关键技术,将虚拟样机技术应用于工业机器人仿真研究过程。然后说明了工业机器人虚拟样机系统的构成与样机系统在机器人仿真研究中的研究内容。总结该项技术主要解决以下两方面的问题,即机器人仿真研究中的系统集成及为以机器人为主体的生产线虚拟设计、验证环境提供底层的数字化环境。
2 虚拟样机技术
基于先进的建模技术、多领域仿真技术、信息管理技术、交互式用户界面技术和虚拟现实技术的综合应用技术。1P技术在设计的初级阶段—概念设计阶段就可以对整个系统进行完整的分析,虚拟样机技术涉及多体系统运动学与动力学建模理论及其技术实现。观察并实验各组成部分的相互运动情况。通过系统仿真软件在相应虚拟环境中真实地模拟系统的运动,计算机上可方便地修改设计缺陷,仿真不同的设计方案,对系统进行不时的改进,直至获得最优的设计方案以后,再做出物理样机。
即在设计时期可确定关键参数,虚拟样机的设计方法体现出并行工程的概念和思想。今后先进制造技术的发展方向。与激进方法相比具有诸多优势。更新产品开发过程,缩短开发周期、降低利息和提高产品质量。虚拟样机的关键技术包括以下方面:
1 系统集成性
虚拟样机执行环境需要在不同的系统间进行转换,虚拟样机解决方案涉及到多方面的技术。其集成性包括以下方面:
CA D环境中建立机械系统三维模型并进行简单的运动性能分析;
并导入虚拟样机分析系统,由几何模型转换为CA D系统中的几何模型。进行运动学与动力学分析;
并将后者的分析结果回传给虚拟样机虚拟样机中的载荷传送给有限元分析软件。;
生产线模型及其控制系统的规范与虚拟样机的集成。
2 系统参数化
可在多仿真参数前提下对虚拟样机系统进行反复测试,建立参数化的虚拟样机系统。对多种条件下的仿真输出结果进行分析比拟,为系统进一步优化奠定基础。
3 系统优化
提供优化的系统参数与设计结果。虚拟样机解决方案在系统多参数及虚拟验证前提下选择设计者需要的方案。
4 系统可视化与交互性
使操作者有高真实性的沉溺感。由于具有可视化方面的优势,系统提供良好的模型显示环境。设计过程中设计者可交互式探索虚拟机械系统的功能,仿真真实环境对虚拟样机进行反复调试,充分将自身的经验和能力结合到计算机的虚拟样机的设计过程中。
3工业机器人虚拟样机
3.1机器人数字化虚拟样机系统
针对于机器人设计与制造过程中的运动学、动力学分析,机器人虚拟样机系统将机器人研究与虚拟样机技术相结合。轨迹和路径规划,机器人与工作环境的相互作用等技术内容进行研究与系统开发,虚拟环境中完成机器人的设计、分析及虚拟生产过程的实现。系统的具体构成如图1
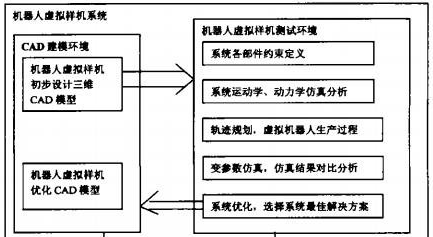
图1机器人虚拟样机系统
3.2机器人虚拟样机系统的功能及技术特点
其主要功能有以下方面:机器人虚拟样机系统的核心功能是提供用于在计算机上进行机器人设计与开发的虚拟环境。
1 机器人虚拟样机系统可视化
而CA D几何建模是核心。机器人虚拟样机可视化环境具有以下特征:建立可视化环境是虚拟样机系统的基础工作。
操作者可直观、高效地在此基础上进行机器人的设计与开发,计算机上实现机器人操作机的可视化环境。良好的环境可使操作者方便地将自身经验和知识随时溶人系统;
虚拟样机系统进一步的工作过程,从CA D模型中提取几何数据。如运动分析、动力学仿真中加以利用;
机器人CA D模型在结构上有所不同。样机初期的概念性设计阶段,虚拟样机开发的不同阶段。机器人CA D几何模型可能较为粗略,只为满足当前设计需要,某些详细的几何结构可不必建模;详细设计阶段,样机经过反复验证与完善,系统得到优化后的几何数据,可对样机进行详细的几何建模,形成整个虚拟样机的机器人仿真结果。
2 机器人工作过程预先演示
包括各部分的几何结构与参数、关节数量、类型等因素,根据机器人操作机本体构成。通过对运动方程的正向和逆向求解,仿真实现机器人的运动分析。同时在运动分析过程中还可实现对机器人的运动空间分析,工作轨迹规划,碰撞、干涉校验等进行仿真研究。
3 机器人虚拟样机动力学分析
如操作机材料种类、质量、转动惯量、关节摩擦等物理因素,通过在虚拟样机系统中加人物理信息。进行动力学分析。动力学分析过程中,可仿真机器人操作机实际工作情况对虚拟样机预加载荷,或施加重力作用,从而分析样机在各种工况下各部分的受力情况,研究重点环节,优化系统结构。
4机器人控制系统仿真
对控制系统进行测试,机器人虚拟样机可提供控制系统仿真环境。这一方面虚拟样机比物理样机具有明显优势。各种控制方法可直接作用于物理样机,高效省时,无需担心错误的控制方法造成样机的损坏。
机器人虚拟样机系统具有如下技术特点:
使各部分之间的仿真及分析结果及时、高效率地互相加以利用,1提供机器人仿真研究的集成系统和数字化机器人设计、验证环境机器人虚拟样机系统提供包括数字化建模、可视化的运动过程实现、运动学分析、控制系统仿真在内的统一数据平台。提供数字化的研究环境。
机器人虚拟样机系统能够有效溶人上一层次的数字化加工制造环境,2构成数字化虚拟制造环境的有机组成局部工业机器人是制造系统中的基本工作单元。满足虚拟制造环境中机器人工作单元上层的生产线仿真、数字化工厂要求,构成数字化机器人生产线的基础与有机组成局部。
3.3机器人虚拟样机系统实现的技术手段
3.3.1采用高水平的几何建模工具
商业化的三维造型软件如Pro/EUG及SolidWod等已可以顺利在微机平台上正常运行,随着软件技术的发展。而无需专业的图形工作站。这些软件都可以建立高逼真度的机器虚拟样机几何模型,同时又具有IGESSTEPParasolid等多种几何数据转换格式来提供机器人虚拟样机设计与测试过程中需要的几何数据,适宜的机器人虚拟样机几何建模开发工具。
3.3.2机器人虚拟样机系统的开发工具
一种是采用通用的软件开发工具,机器人虚拟样机系统的开发工具主要分两类。另一种是专业的虚拟样机或机器人开发软件。前者目前较常用的C++较早有 FortranPas.cal等。采用通用软件开发的机器人虚拟样机系统的特点是软件针对性强,解决设计者具体问题。但要建立样机的运动学、动力学研究等必需的详尽而正确的模型,需耗费大量时间和精力,且开发出的系统灵活性差,不易调整。
系统提供运动学、动力学等方面的仿真功能,AdamEnvision等是商业虚拟样机开发工具…1软件可建立简单的几何模型或从外部CA D软件导人已建立完毕的机器人几何模型。建立机器人虚拟样机设计与优化环境,并具有完善的仿真结果数据处置能力。软件可使设计者从繁琐的机器人动态建模过程中解脱出来,将更多精力用于样机的虚拟设计与验证过程。
ABB 256KB ETHERNET CPU PM581-ETH C3 / ISAP140100R0170
GOULD MODICON REED RELAY OUTPUT MODULE AS-B840-108
C&A MARK VII MICROCOMPUTER PROGRAMMABLE LIMIT SWITCH
PRO-FACE DIGITAL GRAPHIC PANEL GP570-SC11
ANN ARBOR TECHNOLOGIES INX8500 INTERFACE DISPLAY
DIGITAL ELECTRONICS PRO-FACE INTERFACE 0880014-02 / GP370-SC31-24V *SCUFFED*
SUMITOMO POWER MODULE SA765075AX
FANUC ROBOTICS E-STOP PANEL BOARD A05B-2400-C012
INGERSOLL-RAND TORQUE CONTROLLER PFSI-G *HINGE PIN*
HONEYWELL UDC5000 ULTRA-PRO TEMPERATURE CONTROLLER DC5067-0-1002-1?00-00-011 *TAB
ALLEN BRADLEY INVIEW LED MESSAGE DISPLAY 2706-P22R SER A REV B FRN 1.10 NO FRAME
MARPOSS E54 OPERATOR PANEL 6830199403
STATIC CONTROLS CORP. LED NUMERIC DISPLAY BOARD AD-0801-001 / AD-0801-013 NNB
AC-PRO MICRO CONTROLLER B-501QT-VR ,NIB
FANUC GMF ROBOTICS CRT/KB UNIT CONTROL PANEL A05B-2022-C104
SANYO DENKI SSF104001 CONTROLLER BOARD PRS-38746
DGD CONTROLLER-A-R OPERATOR INTERFACE 960254, TESTED
FINLANDIA INTERFACE 927530
STATIC CONTROLS CORP. LED DISPLAY BOARD AD-0974-015 / AD-0974-019
EFD CONTROL PANEL Y5000-36002
HONEYWELL UDC5000 ULTRA-PRO TEMP CONTROLLER DC5062-0-1002-1?10-00-0111 *TABS*
ALLEN BRADLEY VersaView 1550M OPERATOR INTERFACE DISPLAY 6176M-15PN SER A REV. A
CNC CONTROL PANEL BOARD NO PART #
FANUC * R-H CRT/KB OPERATOR INTERFACE * A05B-2301-C130
HORNER ELECTRIC OPERATOR INTERFACE PANEL HE190IBSRMUC
FANUC ROBOTICS TEACH PENDANT A05B-2051-C143 *PART LABEL*
NUMATICS * FLEXIBLOK FILTER * C32D-03JMS01
YASKAWA * OPERATOR PANEL * JZNC-MPB02E
RED LION CONTROLS MODEL IMP PANEL METER DISPLAY IMP20000
AYDIN CONTROLS OPERATOR INTERFACE MONITOR MODEL 8830, NO HOUSING
PIXELINK LCD TOUCH SCREEN DISPLAY PX15-LCD-IBM-T
HARDINGE TORQUE LIMITER HUB SG-0012128
HONEYWELL UDC5000 ULTRA-PRO TEMP CONTROLLER DC5066-0-0A00-1?00-00-0111 *TABS*
MITAC WORKSTATION OPERATOR INTERFACE MWS-200R REV.R 2.6
SMITH SINGLE STAGE OXYGEN REGULATOR 3000PSI NIB HB1510A-540
DYNICS OPERATOR COMPUTER MONITOR DYNWX15PTSMAR25 / WX15PTSMAR *NIB*
LJU HANDHELD PROGRAMMING DEVICE MU-505
GE FANUC 9" CRT DISPLAY MODULE SERIES 16-TT D9CM-01A / XA02B-0120-C052?#16TT
HUBBELL PLUG TWIST LOCK 15A 125V NIB HBL4720C
UTICOR TECHNOLOGY PROGRAMMABLE MESSAGE DISPLAY 76711-16 REV. B
ALLEN BRADLEY OPERATOR INTERFACE DISPLAY PANEL 6156-AAZAAZAZAZ SER. B
LIEBERT * PROCESSOR BOARD * ASSY# 02-792225-00
UniOP OPERATOR INTERFACE PAD32-0050
T80216 PCB MODULE TCP-5233A
MITSUBISHI 24VDC GRAPHIC OPERATION TERMINAL A850GOT-SWD
SCHNEIDER ELECTIRC iPC MAGELIS OPERATOR INTERFACE PANEL XBTF024610 *CRACKED*
PARALLEL IN/OUT T80267 PCB MODULE TPC-5261
FANUC ROBOTICS OPERATOR INTERFACE PANEL A05B-2440-C120
SCIEMETRIC SigPOD PROCESS MONITOR 1202
GE FANUC 520MM OPERATOR PANEL 44C741056-G01R0?9
NEMATRON INDUSTRIAL COMPUTER OPERATOR INTERFACE ICI5350140C8461
FANUC ROBOTICS FUJITSU CONTROL PANEL OPTION UNIT A02B-0048-C540
FANUC FUJITSU OPERATOR INTERFACE PANEL A02B-0051-C031
LOAD CONTROL INCORPORATED PUMP LOAD CONTOL PMP-25
PARALLEL ISOLATION T80036 MODULE TPC-5238
T80241 PCB MODULE TPC-5260A
FESTO CONTROL PANEL L-335596 0694W/K-251528 L1193, NIB
UTICOR TECHNOLOGY PROGRAMMABLE MESSAGE DISPLAY OPERATOR INTERFACE 76711-32 REV D